|
Положения равновесия линейных автономных систем
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Основные типы точек равновесия
Пусть задана линейная однородная система второго порядка с постоянными коэффициентами:
 В матричной форме система уравнений записывается как   Классификация положений равновесия определяется собственными значениями λ1, λ2 матрицы A. Числа λ1, λ2 находятся из решения характеристического уравнения 
Если действительная часть хотя бы одного собственного числа положительна, то соответствующее положение равновесия является неустойчивым. Например, это может быть седло. Наконец, в случае чисто мнимых корней (точка равновесия является центром) мы имеем дело с классической устойчивостью в смысле Ляпунова. Наша дальнейшая цель состоит в том, чтобы изучить поведение решений вблизи положений равновесия. Для систем 2-го порядка это удобно делать графически с помощью фазового портрета, представляющего собой совокупность фазовых траекторий на координатной плоскости. Стрелки на фазовых траекториях показывают направление перемещения точки (т.е. некоторого конкретного состояния системы) с течением времени. Рассмотрим подробнее каждый тип точки равновесия и соответствующие фазовые портреты.
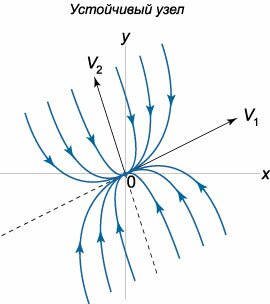
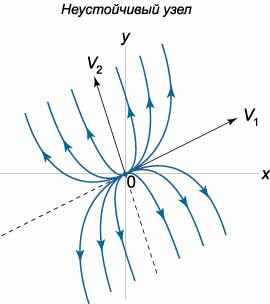
Устойчивый и неустойчивый узел
Собственные значения λ1, λ2 точек типа "узел" удовлетворяют условиям:
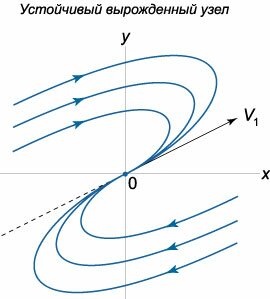
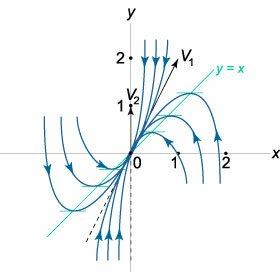
 Корни λ1, λ2 различны  Поскольку оба собственных значения отрицательны, то решение Уточним направление фазовых траекторий. Поскольку     В случае  Теперь рассмотрим поведение фазовых траекторий при  Соответственно, при  С учетом рассмотренных свойств фазовых траекторий, фазовый портрет устойчивого узла имеет вид, показанный схематически на рисунке 1.
Корни λ1, λ2 различны Заметим, что в случае как устойчивого, так и неустойчивого узла фазовые траектории касаются прямой, которая направлена вдоль собственного вектора, соответствующего меньшему по абсолютной величине собственному значению λ.
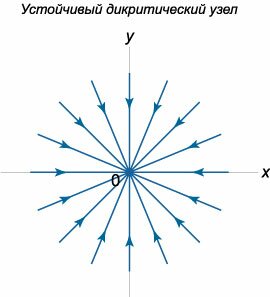
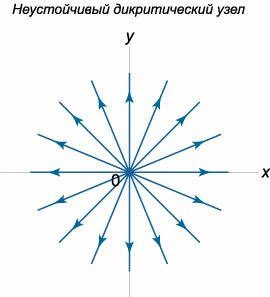
Дикритический узел
Пусть характеристическое уравнение имеет один нулевой корень кратности 2, т.е. рассмотрим случай  Случай Случай
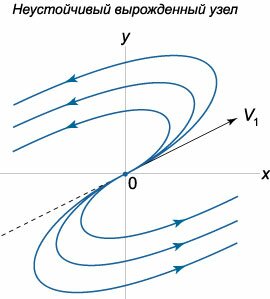
Вырожденный узел
Пусть собственные значения матрицы A снова являются совпадающими: В случае При
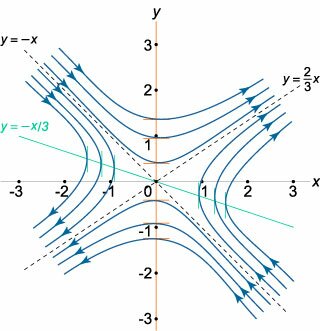
Седло
Положение равновесия является седлом при условиях

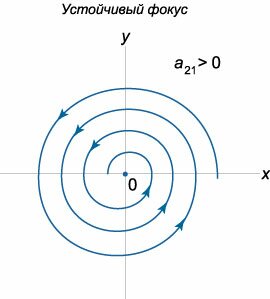
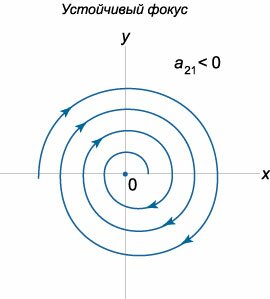
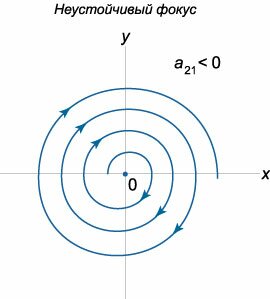
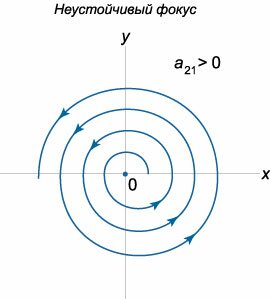
Устойчивый и неустойчивый фокус
Пусть теперь собственные значения λ1, λ2 являются комплексными числами, действительные части которых не равны нулю. Если матрица A состоит из действительных чисел, то комплексные корни будут представляться в виде комплексно-сопряженных чисел:
        Направление закручивания спиралей можно определить по знаку коэффициента a21 в исходной матрице A. Действительно, рассмотрим производную dy/dt, например, в точке (1,0):  Таким образом, с учетом направления закручивания спиралей, всего существует 4 различных вида фокуса. Схематически они показаны на рисунках 8-11.
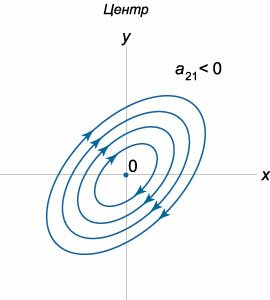
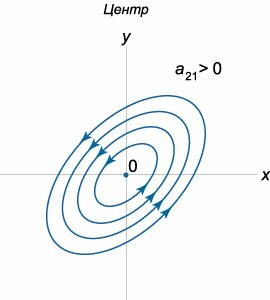
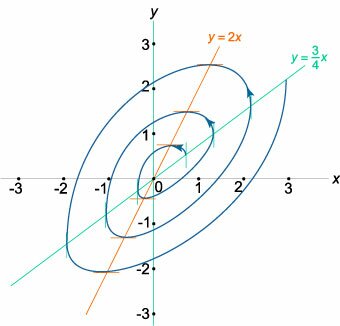
Центр
Если собственные значения матрицы A являются число мнимыми числами, то такое положение равновесия называется центром. Для матрицы с действительными элементами мнимые собственные значения будут комплексно-сопряженными. В случае центра фазовые траектории формально получаются из уравнения спиралей при Возможны два вида центра, различающиеся направлением движения точек (рисунки 12, 13). Как и в случае спиралей, направление движения можно определить, например, по знаку производной dy/dt в какой-либо точке. Если взять точку (1,0), то 
Теперь обратимся к случаю вырожденной матрицы A.
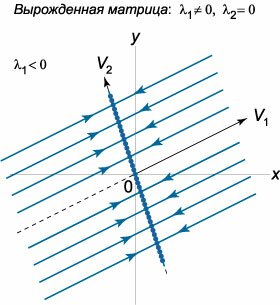
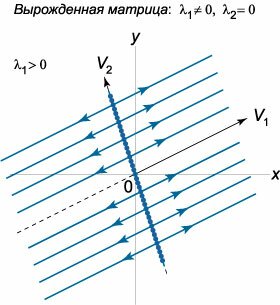
Вырожденная матрица
Если матрица является вырожденной, то у нее одно или оба собственных значения равны нулю. При этом возможны следующие частные случаи:Случай Здесь общее решение записывается в виде 
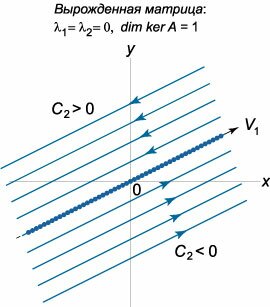
В этом случае размерность собственного подпространства матрицы равна 2 и, следовательно, существуют два собственных вектора V1 и V2. Такая ситуация возможна при нулевой матрице A. Общее решение выражается формулой  Случай Данный случай вырожденной матрицы отличается от предыдущего тем, что существует лишь 1 собственный вектор (Матрица A при этом будет ненулевой). Для построения базиса в качестве второго линейно независимого вектора можно взять вектор W1, присоединенный к V1. Общее решение системы записывается в виде  Как видно, в случае вырожденной матрицы существует 4 различных фазовых портрета, Таким образом, линейная автономная система второго порядка допускает всего 17 различных фазовых портретов.
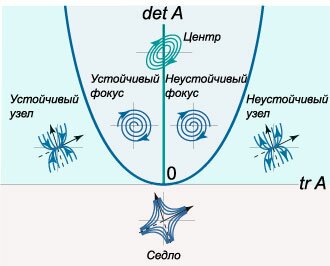
Бифуркационная диаграмма
Выше мы рассмотрели классификацию положений равновесия линейной системы, основанную на собственных значениях. Однако тип точки равновесия можно определить и без вычисления собственных значений λ1, λ2, а зная лишь только определитель матрицы Напомним, что следом матрицы называется число, равное сумме диагональных элементов:      Устойчивые режимы движения существуют в левом верхнем квадранте бифуркационной диаграммы. Остальные три квадранта соответствуют неустойчивым положениям равновесия.
Алгоритм построения фазового портрета
Для схематического построения фазового портрета линейной автономной системы 2-го порядка с постоянными коэффициентами

Описанный алгоритм не является жесткой схемой. При исследовании конкретной системы вполне допустимы различные вариации и другие приемы, позволяющие в итоге изобразить фазовый портрет. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Пример 1
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Исследовать положения равновесия линейной автономной системы и начертить ее фазовый портрет.
Решение.
1. Запишем матрицу систему и вычислим ее определитель:
  3. Определим уравнения главных изоклин, т.е. прямых, которые являются касательными к фазовым траекториям. Уравнение вертикальной изоклины имеет вид:   
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Пример 2
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Исследовать положения равновесия динамической системы и схематически изобразить ее фазовый портрет.
Решение.
Убедимся сначала, что определитель матрицы не равен нулю:
 1. Решим данную задачу без вычисления собственных значений и собственных векторов. 2. Поскольку определитель 3. Определим уравнения изоклин. Вертикальная изоклина описывается следующей линейной функцией:     6. Определим направление движения вдоль фазовых траекторий. Возьмем, к примеру, точку (1,0) и вычислим производную dy/dt в этой точке:  |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Пример 3
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Исследовать точки равновесия и начертить фазовый портрет следующей системы:
Решение.
Определитель матрицы данной системы равен
 1. Вычислим собственные значения матрицы A:  3. Найдем уравнения изоклин. Вертикальная изоклина описывается следующим уравнением:    5. С учетом найденных данных построим схематический фазовый портрет системы (рис.20).
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Пример 4
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Исследовать устойчивость системы в зависимости от параметра a:
Решение.
Вычислим след и определитель матрицы A:
   Выясним, при каких значениях a нулевая точка будет седлом. Согласно бифуркационной диаграмме седло существует при условии  Ясно, что положение равновесия типа "узел" существует при следующих значениях параметра a:  В результате имеем:    Рассмотрим отдельно случаи в граничных точках    Пусть теперь   Собирая вместе полученные результаты, запишем окончательный ответ. Система имеет следующие положения равновесия в зависимости от параметра a :
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||