|
|
|
|
Свойства и приложения криволинейного интеграла
|
|
|
Скалярные функции: \(F\left( {x,y,z} \right)\), \(F\left( {x,y} \right)\), \(f\left( x \right)\)
Скалярный потенциал: \(u\left( {x,y,z} \right)\)
Кривые: \(C\), \({C_1}\), \({C_2}\)
Пределы интегрирования: \(a\), \(b\), \(\alpha\), \(\beta\)
Параметры: \(t\), \(s\)
Полярные координаты: \(r\), \(\theta\)
Векторное поле: \(\mathbf{F}\left( {P,Q,R} \right)\)
Позиционный вектор: \(\mathbf{r}\left( s \right)\)
Единичные векторы: \(\mathbf{i}\), \(\mathbf{j}\), \(\mathbf{k}\), \(\vec{\tau}\)
Площадь области: \(S\)
Длина кривой: \(L\)
|
Масса кривой: \(m\)
Плотность кривой: \(\rho\left( {x,y,z} \right)\), \(\rho\left( {x,y} \right)\)
Координаты центра масс: \(\bar x\), \(\bar y\), \(\bar z\)
Первые моменты: \({M_{xy}}\), \({M_{yz}}\), \({M_{xz}}\)
Моменты инерции: \({I_x}\), \({I_y}\), \({I_z}\)
Объем тела: \(V\)
Работа поля: \(W\)
Индукция магнитного поля: \(\mathbf{B}\)
Ток: \(I\)
Электродвижущая сила: \(\varepsilon\)
Магнитный поток: \(\psi\)
|
-
Криволинейный интеграл первого рода
Пусть кривая \(C\) задана векторной функцией \(\mathbf{r} = \mathbf{r}\left( s \right)\), \(0 \le s \le S\), и на этой кривой задана скалярная функция \(F\).
Криволинейный интеграл первого рода от функции \(F\) вдоль кривой \(C\) записывается в виде
\(\large\int\limits_0^S\normalsize {F\left( {\mathbf{r}\left( s \right)} \right)ds} = \large\int\limits_C\normalsize {F\left( {x,y,z} \right)ds} = \large\int\limits_C\normalsize {Fds},\)
где \(ds\) − дифференциал дуги кривой.
-
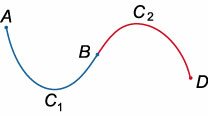
Криволинейный интеграл (первого рода) вдоль объединения кривых равен сумме интегралов по каждой кривой:
\(\large\int\limits_{{C_1} \cup {C_2}}\normalsize {Fds} = \large\int\limits_{{C_1}}\normalsize {Fds} + \large\int\limits_{{C_2}}\normalsize {Fds} \)
-
Если гладкая кривая \(C\) задана параметрическим уравнением \(\mathbf{r} = \mathbf{r}\left( t \right)\), \(\alpha \le t \le \beta\), то криволинейный интеграл (первого рода) выражается формулой
\(\large\int\limits_C\normalsize {F\left( {x,y,z} \right)ds} = \large\int\limits_\alpha^\beta\normalsize {F\left( {x\left( t \right),y\left( t \right),z\left( t \right)} \right)\sqrt {{{\left( {x'\left( t \right)} \right)}^2} + {{\left( {y'\left( t \right)} \right)}^2} + {{\left( {z'\left( t \right)} \right)}^2}} dt} \)
-
Если \(C\) является гладкой кривой, лежащей в плоскости \(Oxy\) и заданной явным уравнением \(y = f\left( x \right)\), \(a \le x \le b\), то криволинейный интеграл определяется выражением
\(\large\int\limits_C\normalsize {F\left( {x,y} \right)ds} = \large\int\limits_a^b\normalsize {F\left( {x,f\left( x \right)} \right)\sqrt {1 + {{\left( {f'\left( x \right)} \right)}^2}} dx} \)
-
Криволинейный интеграл первого рода в полярных координатах
\(\large\int\limits_C\normalsize {F\left( {x,y} \right)ds} = \large\int\limits_\alpha^\beta\normalsize {F\left( {r\cos \theta ,r\sin \theta } \right)\sqrt {{r^2} + {{\left( {\large\frac{{dr}}{{d\theta }}}\normalsize \right)}^2}} d\theta } \),
где кривая \(C\) задана полярной функцией \(r\left( \theta \right)\).
-
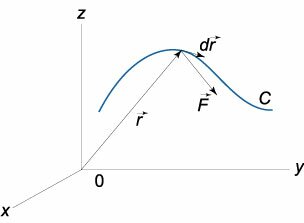
Криволинейный интеграл второго рода
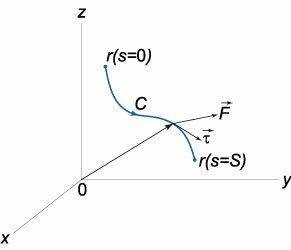
Пусть кривая \(C\) определяется векторной функцией \(\mathbf{r} = \mathbf{r}\left( s \right)\), \(0 \le s \le S\). Вектор
\(\large\frac{{d\mathbf{r}}}{{ds}}\normalsize = \vec{\tau} = \left( {\cos \alpha ,\cos \beta ,\cos \gamma } \right)\)
представляет собой единичный вектор касательной к данной кривой.
Пусть на кривой \(C\) задано также векторное поле \(\mathbf{F}\left( {P,Q,R} \right)\). Тогда криволинейный интеграл второго рода от векторной функции \(\mathbf{F}\) вдоль кривой \(C\) выражается в виде
\(\large\int\limits_C\normalsize {Pdx + Qdy + Rdz} = \large\int\limits_0^S\normalsize {\left( {P\cos \alpha + Q\cos \beta + R\cos \gamma } \right)ds} \)
-
Свойства криволинейного интеграла второго рода
\(\large\int\limits_{ - C}\normalsize {\left( {\mathbf{F} \cdot d\mathbf{r}} \right)} = - \large\int\limits_C\normalsize {\left( {\mathbf{F} \cdot d\mathbf{r}} \right)} \),
где \(-C\) обозначает кривую противоположного направления.
\(\large\int\limits_C\normalsize {\left( {\mathbf{F} \cdot d\mathbf{r}} \right)} = \large\int\limits_{{C_1} \cup {C_2}}\normalsize {\left( {\mathbf{F} \cdot d\mathbf{r}} \right)} = \large\int\limits_{C_1}\normalsize {\left( {\mathbf{F} \cdot d\mathbf{r}} \right)} + \large\int\limits_{C_2}\normalsize {\left( {\mathbf{F} \cdot d\mathbf{r}} \right)} \),
где \(C\) является объединением кривых \({C_1}\) и \({C_2}\).
-
Если кривая \(C\) задана параметрически в виде \(\mathbf{r}\left( t \right) = \left( {x\left( t \right),y\left( t \right),z\left( t \right)} \right)\), \(\alpha \le t \le \beta \), то криволинейный интеграл (второго рода) равен
\(\large\int\limits_C\normalsize {Pdx + Qdy + Rdz} = \large\int\limits_\alpha^\beta\normalsize {\left( {P\left( {x\left( t \right),y\left( t \right),z\left( t \right)} \right)\large\frac{{dx}}{{dt}}\normalsize \\ + Q\left( {x\left( t \right),y\left( t \right),z\left( t \right)} \right)\large\frac{{dy}}{{dt}}\normalsize + R\left( {x\left( t \right),y\left( t \right),z\left( t \right)} \right)\large\frac{{dz}}{{dt}}\normalsize} \right)dt} \)
-
Если кривая \(C\) лежит в плоскости \(Oxy\) и задана уравнением \(y = f\left( x \right)\), \(a \le x \le b\), то криволинейный интеграл (второго рода) записывается в виде
\(\large\int\limits_C\normalsize {Pdx + Qdy} = \large\int\limits_\alpha^\beta\normalsize {\left( {P\left( {x,f\left( x \right)} \right) + Q\left( {x,f\left( x \right)} \right)\large\frac{{df}}{{dx}}\normalsize} \right)dx} \)
-
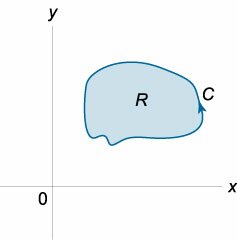
Формула Грина
\(\large\iint\limits_C\normalsize {\left( {\large\frac{{\partial Q}}{{\partial x}}\normalsize - \large\frac{{\partial P}}{{\partial y}}\normalsize} \right)dxdy} = \large\oint\limits_C\normalsize {Pdx + Qdy} \),
где \(\mathbf{F} = P\left( {x,y} \right)\mathbf{i} + Q\left( {x,y} \right)\mathbf{j}\) является непрерывной векторной функцией с непрерывными частными производными \(\partial P/\partial y\), \(\partial Q/\partial x\), заданной в некоторой области \(R\), ограниченной замкнутой, кусочно-непрерывной и гладкой кривой \(C\).
-
Площадь области \(R\), ограниченной кривой \(C\)
\(S = \large\iint\limits_R\normalsize {dxdy} = \large\frac{1}{2}\oint\limits_C\normalsize {xdy - ydx} \)
-
Независимость от пути интегрирования
Криволинейный интеграл (второго рода) от векторной функции \(\mathbf{F} = P\mathbf{i} + Q\mathbf{j} + R\mathbf{k}\) не зависит от пути интегрирования, если \(P\), \(Q\) и \(R\) непрерывны в некоторой области \(D\) и в этой области существует скалярная функция \(u = u\left( {x,y,z} \right)\) (скалярный потенциал), такая, что
\(\mathbf{F} = \text{grad }u\) или \(\partial u/\partial x = P\), \(\partial u/\partial y = Q\), \(\partial u/\partial z = R\).
Тогда интеграл равен
\(\large\int\limits_C\normalsize {\mathbf{F}\left( \mathbf{r} \right) \cdot d\mathbf{r}} = \large\int\limits_C\normalsize {Pdx + Qdy + Rdz} = u\left( B \right) - u\left( A \right)\)
-
Признак потенциальности векторного поля
Векторное поле, обладающее свойством \(\mathbf{F} = \text{grad }u\), называется потенциальным. Криволинейный интеграл от векторной функции \(\mathbf{F} = P\mathbf{i} + Q\mathbf{j} + R\mathbf{k}\) не зависит от пути интегрирования тогда и только тогда, когда
\(\text{rot }\mathbf{F} = \left| {\begin{array}{*{20}{c}} \mathbf{i} & \mathbf{j} & \mathbf{k}\\ {\large\frac{\partial }{{\partial x}}\normalsize} & {\large\frac{\partial }{{\partial y}}\normalsize} & {\large\frac{\partial }{{\partial z}}\normalsize}\\ P & Q & R \end{array}} \right| = \mathbf{0}.\)
Если криволинейный интеграл рассматривается в плоскости \(Oxy\), то в случае потенциального поля справедливо соотношение
\(\large\int\limits_C\normalsize {Pdx + Qdy} = u\left( B \right) - u\left( A \right).\)
В таком случае признак потенциальности поля принимает вид
\(\large\frac{{\partial P}}{{\partial y}}\normalsize = \large\frac{{\partial Q}}{{\partial x}}\normalsize.\)
-
Длина кривой
\(L = \large\int\limits_C\normalsize {ds} = \large\int\limits_\alpha^\beta\normalsize {\left| {\large\frac{{d\mathbf{r}}}{{dt}}\normalsize\left( t \right)} \right|dt} = \large\int\limits_\alpha^\beta\normalsize {\sqrt {{{\left( {\large\frac{{dx}}{{dt}}\normalsize} \right)}^2} + {{\left( {\large\frac{{dy}}{{dt}}\normalsize} \right)}^2} + {{\left( {\large\frac{{dz}}{{dt}}\normalsize} \right)}^2}} dt} \),
где \(C\) является кусочно-непрерывной гладкой кривой, заданной позиционным вектором \(\mathbf{r}\left( t \right)\), \(\alpha \le t \le \beta\).
В случае двумерной кривой, ее длина выражается формулой \(L = \large\int\limits_C\normalsize {ds} = \large\int\limits_\alpha^\beta\normalsize {\left| {\large\frac{{d\mathbf{r}}}{{dt}}\normalsize\left( t \right)} \right|dt} = \large\int\limits_\alpha^\beta\normalsize {\sqrt {{{\left( {\large\frac{{dx}}{{dt}}\normalsize} \right)}^2} + {{\left( {\large\frac{{dy}}{{dt}}\normalsize} \right)}^2}} dt} \).
Если кривая \(C\) лежит в плоскости \(Oxy\) и описывается явной функцией \(y = f\left( x \right)\), \(a \le x \le b\), ее длина равна
\(L = \large\int\limits_a^b\normalsize {\sqrt {1 + {{\left( {\large\frac{{dy}}{{dx}}\normalsize} \right)}^2}} dx} \).
-
Длина кривой в полярных координатах
\(L = \large\int\limits_\alpha^\beta\normalsize {\sqrt {{{\left( {\large\frac{{dr}}{{d\theta }}\normalsize} \right)}^2} + {r^2}} d\theta } \),
где кривая \(C\) задана уравнением в полярных координатах \(r = r\left( \theta \right)\), \(\alpha \le \theta \le \beta\).
-
Масса кривой
\(m = \large\int\limits_C\normalsize {\rho \left( {x,y,z} \right)ds} \),
где \({\rho \left( {x,y,z} \right)}\) представляет собой линейную плотность кривой.
Если кривая \(C\) задана параметрически векторной функцией \(\mathbf{r}\left( t \right) = \left( {x\left( t \right),y\left( t \right),z\left( t \right)} \right)\), \(\alpha \le t \le \beta \), то ее масса вычисляется по формуле
\(m = \large\int\limits_\alpha^\beta\normalsize {\rho \left( {x\left( t \right),y\left( t \right),z\left( t \right)} \right)\sqrt {{{\left( {\large\frac{{dx}}{{dt}}\normalsize} \right)}^2} + {{\left( {\large\frac{{dy}}{{dt}}\normalsize} \right)}^2} + {{\left( {\large\frac{{dz}}{{dt}}\normalsize} \right)}^2}} dt} .\)
Если кривая \(C\) лежит в плоскости \(Oxy\), то ее масса равна
\(m = \large\int\limits_C\normalsize {\rho \left( {x,y} \right)ds} \)
или
\(m = \large\int\limits_\alpha^\beta\normalsize {\rho \left( {x\left( t \right),y\left( t \right)} \right)\sqrt {{{\left( {\large\frac{{dx}}{{dt}}\normalsize} \right)}^2} + {{\left( {\large\frac{{dy}}{{dt}}\normalsize} \right)}^2}} dt} \)
(в параметрической форме)
-
Координаты центра масс кривой
\(\bar x = \large\frac{{{M_{yz}}}}{m}\normalsize\), \(\bar y = \large\frac{{{M_{xz}}}}{m}\normalsize\), \(\bar z = \large\frac{{{M_{xy}}}}{m}\normalsize\), где
\({M_{yz}} = \large\int\limits_C\normalsize {x\rho \left( {x,y,z} \right)ds} \), \({M_{xz}} = \large\int\limits_C\normalsize {y\rho \left( {x,y,z} \right)ds} \), \({M_{xy}} = \large\int\limits_C\normalsize {z\rho \left( {x,y,z} \right)ds} \).
-
Моменты инерции
Моменты инерции кривой относительно координатных осей \(Ox\), \(Oy\) и \(Oz\) определяются формулами
\({I_x} = \large\int\limits_C\normalsize {\left( {{y^2} + {z^2}} \right)\rho \left( {x,y,z} \right)ds} \), \({I_y} = \large\int\limits_C\normalsize {\left( {{x^2} + {z^2}} \right)\rho \left( {x,y,z} \right)ds} \), \({I_z} = \large\int\limits_C\normalsize {\left( {{x^2} + {y^2}} \right)\rho \left( {x,y,z} \right)ds} \).
-
Площадь области, ограниченной замкнутой кривой
\(S = \large\oint\limits_C\normalsize {xdy} = - \large\oint\limits_C\normalsize {ydx} = \large\frac{1}{2}\oint\limits_C\normalsize {xdy - ydx} \)
Если замкнутая кривая \(C\) задана в параметрической форме \(\mathbf{r}\left( t \right) = \left( {x\left( t \right),y\left( t \right)} \right)\), \(\alpha \le t \le \beta \), то площадь области вычисляется по формуле
\(S = \large\int\limits_\alpha^\beta\normalsize {x\left( t \right)\large\frac{{dy}}{{dt}}\normalsize dt} = - \large\int\limits_\alpha^\beta\normalsize {y\left( t \right)\large\frac{{dx}}{{dt}}\normalsize dt} = \large\frac{1}{2} \int\limits_\alpha^\beta\normalsize {\left( {x\left( t \right)\large\frac{{dy}}{{dt}}\normalsize - y\left( t \right)\large\frac{{dx}}{{dt}}\normalsize} \right)dt} .\)
-
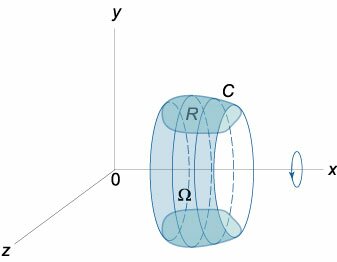
Объем тела, образованного вращением замкнутой кривой относительно оси \(Ox\)
\(V = - \pi \large\oint\limits_C\normalsize {{y^2}dx} = - 2\pi \large\oint\limits_C\normalsize {xydy} = - \large\frac{\pi }{2}\oint\limits_C\normalsize {2xydy + {y^2}dx} \)
-
Работа поля
Работа при перемещении тела в силовом поле \(\mathbf{F}\) вдоль кривой \(C\) описывается криволинейным интегралом второго рода:
\(W = \large\int\limits_C\normalsize {\mathbf{F} \cdot d\mathbf{r}} \),
где \(d\mathbf{r}\) − единичный касательный вектор.
Если тело двигается вдоль кривой \(C\), лежащей в плоскости \(Oxy\), то работа поля равна
\(W = \large\int\limits_C\normalsize {\mathbf{F} \cdot d\mathbf{r}} = \large\int\limits_C\normalsize {Pdx + Qdy} \).
Если путь \(C\) описывается параметром \(t\) (\(t\) часто означает время), то формула для вычисления работы принимает вид:
\(W = \large\int\limits_\alpha^\beta\normalsize {\left[ {P\left( {x\left( t \right),y\left( t \right),z\left( t \right)} \right)\large\frac{{dx}}{{dt}}\normalsize \\ + Q\left( {x\left( t \right),y\left( t \right),z\left( t \right)} \right)\large\frac{{dy}}{{dt}}\normalsize + R\left( {x\left( t \right),y\left( t \right),z\left( t \right)} \right)\large\frac{{dz}}{{dt}}\normalsize} \right]dt},\)
где \(t\) изменяется от \(\alpha\) до \(\beta\).
Если поле \(\mathbf{F}\) является потенциальным и \(u\left( {x,y,z} \right)\) − скалярный потенциал этого поля, то работа при перемещении тела из точки \(A\) в точку \(B\) находится по формуле
\(W = u\left( B \right) - u\left( A \right)\).
-
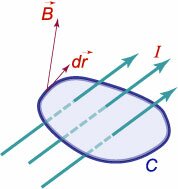
Закон Ампера
\(\large\oint\limits_C\normalsize {\mathbf{B} \cdot d\mathbf{r}} = {\mu _0}I\)
Криволинейный интеграл от магнитного поля \(\mathbf{B}\) вдоль замкнутого контура \(C\) равен полному току \(I\) (с коэффициентом \({\mu _0}\)), протекающему через площадь, ограниченную данным контуром.
-
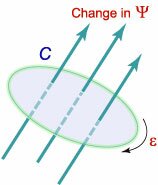
Закон Фарадея
\(\varepsilon = \large\oint\limits_C\normalsize {\mathbf{E} \cdot d\mathbf{r}} = - \large\frac{{d\psi }}{{dt}}\normalsize\)
Электродвижущая сила \(\varepsilon\), наведенная в замкнутом контуре \(C\), равна скорости изменения магнитного потока \(\psi\), проходящего через данный контур.
|
|
|
|